Примена диференцијалних једначина у физици
Као што смо већ споменули, диференцијалне једначине су присутне и у физици. На примерима који следе видећемо како помоћу диференцијалних једначина можемо доћи до закона праволинијског кретања брода, закона кретања тела при слободном паду. Такође, помоћу диференцијалних једначина се описује кретање тела које осцилује.
Пример 1. Брод тежине $Q_b$ са посадом тежине $Q_p$ креће се праволинијски по површини мирне воде почетном брзином $v_0$. Одредити закон кретања брода, ако је отпор воде пропорционалан брзини.
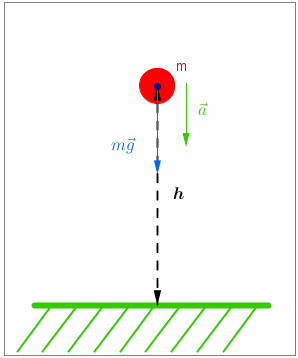
Пример 2. Тело масе $m$ слободно пада из тачке која се налази на висини $h$ изнад површине Земље
са почетном брзином $v(0)=0$. Наћи закон кретања тог тела.
Осцилације и диференцијалне једначине
Помоћу диференцијалних једначина можемо описати кретањa тела које осцилује.
-
Посматраћемо осциловање тела под дејством еластичне силе
Претпоставимо да на тело окачено о еластичну опругу делује само сила која тежи да врати тело у равнотежни положај. То је еластична сила деформисане опруге која је, према Хуковом закону, сразмерна померању: $$\vec{F}=-k\vec{x},\quad\quad k-\mbox{коефицијент еластичности опруге}$$ Знак '-' значи да сила $F$ делује у супротном смеру од вектора положаја $x$ тела везаног за опругу. Из Њутновог закона $m\vec{a}=\vec{F}$ следи једначина кретања: $$m\vec{a}=-k\vec{x}\quad \Rightarrow \quad ma=-kx\quad \Rightarrow \quad m\frac{d^2x}{dt^2}=-kx,$$ односно $$m\frac{d^2x}{dt^2}+kx=0\quad \Leftrightarrow \quad \frac{d^2x}{dt^2}+\frac{k}{m}x=0.$$ Ако уведемо смену $\displaystyle{\omega^2=\frac{k}{m}}$, добијамо једначину осцилације тела $$\frac{d^2x}{dt^2}+\omega^2x=0.$$ Када ову диференцијалну једначину добијамо елонгацију $x(t)$ која се у току времена мења по синусном (или косинусном) закону $$x(t)=a \sin {(\omega t+\varphi)}\quad (x(t)=a \cos {(\omega t+\varphi)}).$$ при чему је :- $x$ - елонгација (удаљеност тела од равнотежног положаја у неком тренутку)
- $\displaystyle{a=\sqrt{\frac{2C_1}{\omega ^2}}=\sqrt{\frac{2C_1m}{k}}}$ - амплитуда (максимално померање тела од равнотежног положаја)
- $\varphi$ - почетна фаза осциловања (осциловање у почетном тренутку $t=0$)
- $\omega t+\varphi$ - фаза осциловања (одређује вредност померања $x$ у датом тренутку)
- $\displaystyle{\omega=\sqrt{\frac{k}{m}}}$ - кружна фреквенција (број радијана за који се промени фаза осциловања у јединици времена)
- $\displaystyle{T=\frac{2 \pi}{\omega}=2 \pi \sqrt{\frac{k}{m}}}$ - период осциловања (најмањи интервал времена за који тело изврши једну осцилацију)
- $\displaystyle{f=\frac{1}{T}}$ - фреквенција осциловања (број осцилација у јединици времена)
Илустрација зависности елонгације $x$ од времена $t$
-
Посматраћемо осциловање тела под дејством еластичне силе и силе отпора средине (пригушене осцилације)
Пригушене осцилације су осцилације у којима амплитуда опада са временом.
Узрок пригушења налази се у дејству спољашњих сила, нпр. силе трења или силе отпора средине.
Претпоставимо да на тело окачено о еластичну опругу делује еластична сила опруге и сила отпора средине.
За мале брзине кретања осцилатора, силе отпора средине, према Стокесовом закону, пропорционалне су брзини кретања тела $$\vec{F}=-b\vec{v},\quad\quad b-\mbox{коефицијент пригушења}$$ Из Њутновог закона $m\vec{a}=\vec{F}$ следи једначина кретања: $$m\vec{a}=-k\vec{x}-b\vec{v}\quad \Rightarrow \quad ma=-kx-bv$$ $$m\frac{d^2x}{dt^2}+b\frac{dx}{dt}+kx=0,$$ односно $$\frac{d^2x}{dt^2}+\frac{b}{m}\cdot\frac{dx}{dt}+\frac{k}{m}\cdot x=0.$$ Нека су $\displaystyle{\omega_0^2=\frac{k}{m}}$ и $\displaystyle{2\lambda=\frac{b}{m}}$ позитивне величине, тада добијамо једначину $$\frac{d^2x}{dt^2}+2\lambda\frac{dx}{dt}+\omega_0^2x=0$$ Уведимо смену $\displaystyle{x=ze^{\, -\lambda t}}$, где је $\lambda$ нова променљива. Тада је : $$\begin{array}{} \frac{dx}{dt}=e^{\, -\lambda t}\frac{dz}{dt}-\lambda e^{\, -\lambda t} z\\ \frac{d^2x}{dt^2}=e^{\, -\lambda t}\frac{d^2z}{dt^2}-2\lambda e^{\, -\lambda t} \frac{dz}{dt}+\lambda^2e^{\, -\lambda t} z \end{array}$$ Заменом добијених вредности у једначину $\displaystyle{\frac{d^2x}{dt^2}+2\lambda\frac{dx}{dt}+\omega_0^2x=0}$ и сређивањем добијамо $$\frac{d^2z}{dt^2}=-(\omega_0^2-\lambda^2)z.$$ Нека је $\omega=\omega_0^2-\lambda^2>0$, тада је $$\frac{d^2z}{dt^2}=-\omega^2z$$ Решавање једначине овог типа смо већ видели у претходном примеру са осцилацијама, па се на исти начин добија да је решење $$z=a\sin {(\omega t+\varphi)}\quad (z=a\cos {(\omega t+\varphi)})$$ Када вратимо смену $x=z e^{\, -\lambda t}$, добијамо елонгацију $x(t)$ $$x(t)=ae^{\, -\lambda t}\sin {(\omega t+\varphi)},$$ односно $$x(t)=A(t)\sin {(\omega t+\varphi)}\quad (x(t)=A(t)\cos {(\omega t+\varphi)}),$$ где је $A(t)=a e^{\, \displaystyle{-\lambda t}}=a e^{\, -\frac{\displaystyle{b}}{\displaystyle{2m}}\displaystyle{t}}.$
Можемо приметити да се амплитуда пригушене осцилације смањује са временом осциловања утолико брже уколико је коефицијент отпора средине већи, а маса тела мања.
Код пригушених осцилација кружна фреквенција $\omega$ је једнака $$\omega^2=\omega_0^2-\lambda^2=\frac{k}{m}-\Big(\frac{b}{2m}\Big)^2=\frac{4km-b^2}{4m^2}$$ и показује број пролаза тела кроз равнотежни положај за време од $\pi$ секунди, а период пригушења осцилација је једнак $$T=\frac{2\pi}{\omega}=\frac{4m\pi}{\sqrt{4km-b^2}}$$Илустрација зависности елонгације $x$ од времена $t$ код пригушених осцилација